

![]()
Para Inglés o Español:
Para japonés:
Clientes de Mexíco:
Servicio Al Cliente - +001-847-871-5931
Soporte técnico - 800-681-5309
Clientes Internacionales:
+1-847-871-5931 o
+1-310-715-3304
Para soporte en productos del catálogo japonés:
1-800-746-6872 o
+1-310-715-3304


















Descripción general de las características de los servomotores
Características de los servomotores
El servomotor es ideal para posicionamiento de alta respuesta y alta precisión. Al ser un motor capaz de lograr control de velocidad y un ángulo de rotación preciso, se puede usar en una variedad de equipos.
Control de lazo cerrado
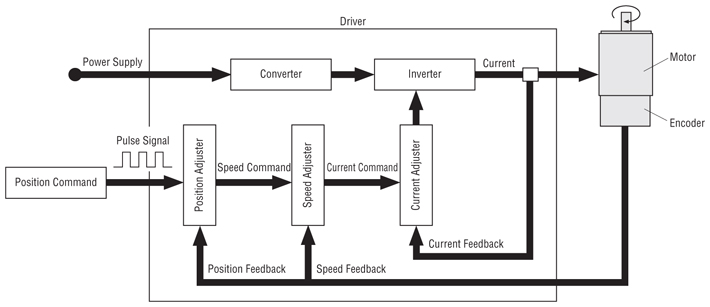
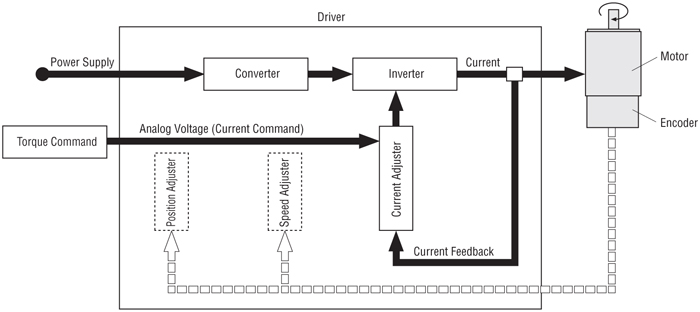
El motor está equipado con un detector de rotación (codificador) que envía la posición/velocidad de rotación del eje del motor de regreso al excitador. El excitador calcula el error de la señal de pulsos o del voltaje analógico (comando de posición/comando de velocidad) del controlador y la señal de retroalimentación (posición actual/velocidad), y controla la rotación del motor para que el error se vuelva igual a cero. El método de Control de lazo cerrado se obtiene con un excitador, un motor y un codificador, a fin de que el motor pueda llevar a cabo operaciones de posicionamiento altamente precisas.
- Se obtiene una señal END que comunica la finalización de la operación de posicionamiento.
- Si ocurre una anomalía como una sobrecarga, es posible que se emita una alarma, lo que permite informar irregularidades en el equipo.
Control de la posición mediante una señal de pulsos
El controlador ingresa la señal de pulsos. Luego, la velocidad y posición son controladas conforme a la cantidad de pulsos.
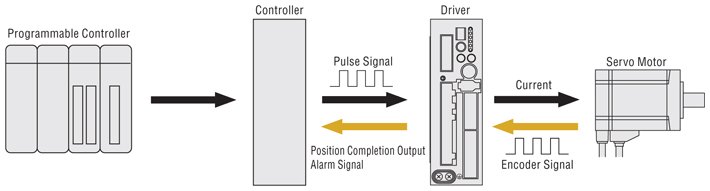
Diagrama de control de posición
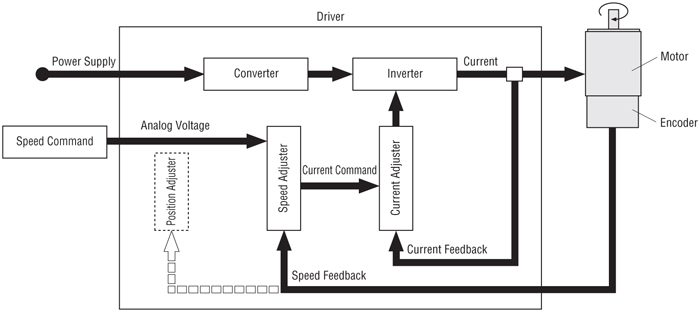
Control de velocidad mediante voltaje analógico
El voltaje analógico es transmitido para controlar la velocidad.
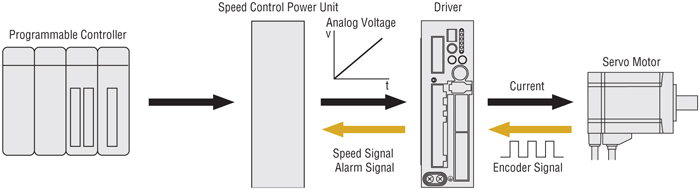
Diagrama de controle de velocidade
Control de par mediante voltaje analógico
El voltaje analógico es transmitido para controlar el par.
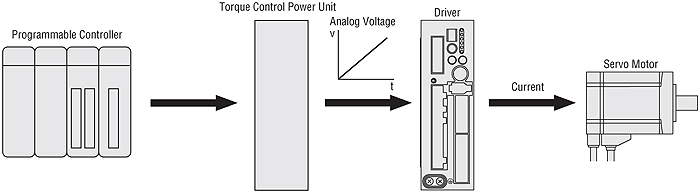
Diagrama de control de par
Compacto y de alta potencia
El servomotor es compacto y liviano, y emite (produce) alta potencia.
- Características de velocidad-par
Potencia nominal de salida: 200 W (1/4 HP)
Tamaño del marco de motor: 60 mm (2.36 in)
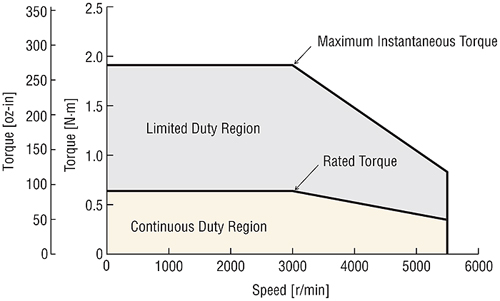
Región de carga continua y región de carga limitada
Un servomotor controla la corriente según el estado de la carga. Debido a la eficiencia y la baja generación de calor del motor, es posible conseguir una operación continua dentro del par nominal. Además, durante la aceleración y desaceleración, la región de carga limitada se usa para obtener un par grande, lo que permite disminuir el tiempo de posicionamiento.
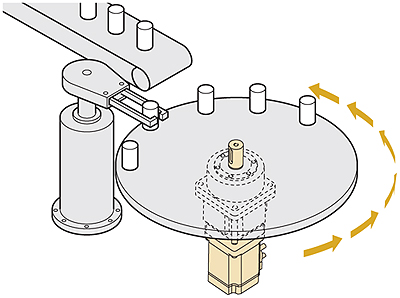
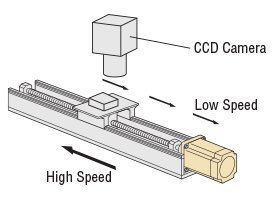
Amplio rango de velocidad variable
Un par plano y estable se genera a partir de un rango de bajas a altas velocidades, a fin de que el posicionamiento de carrera larga se pueda realizar rápidamente. El ciclo de la máquina se mejora en los equipos de prueba al regresar rápidamente a alta velocidad luego de transportar lentamente la pieza de trabajo a baja velocidad.
Los servomotores con reductor también son compatibles con las cargas inerciales grandes
Si bien el servomotor presenta restricciones respecto de la inercia de carga permisible, el servomotor con reductor se puede usar para aumentar en gran medida el tamaño de la carga que puede impulsarse.