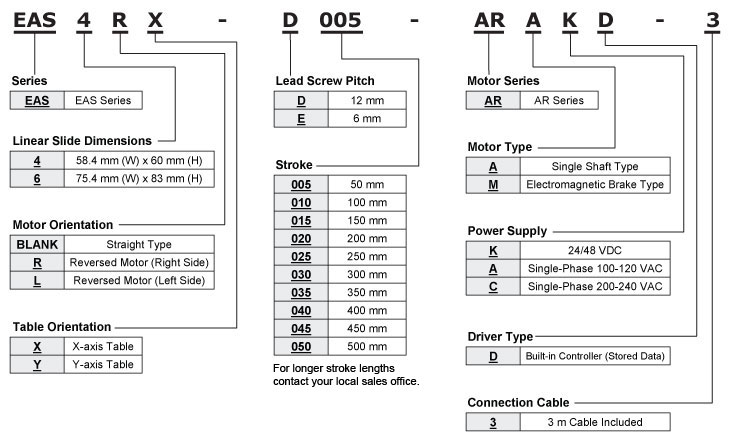


![]()
Para Inglés o Español:
Para japonés:
Clientes de Mexíco:
Servicio Al Cliente - +001-847-871-5931
Soporte técnico - 800-681-5309
Clientes Internacionales:
+1-847-871-5931 o
+1-310-715-3304
Para soporte en productos del catálogo japonés:
1-800-746-6872 o
+1-310-715-3304


















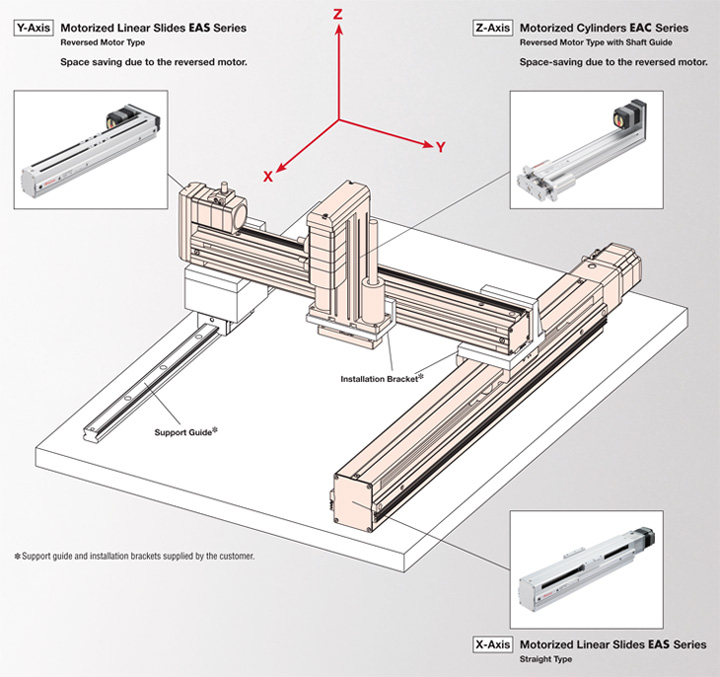
EAS Series Closed Loop Guías deslizantes lineales

Guías deslizantes lineales de lazo cerrado de la serie EAS
Los actuadores lineales de la serie EAS ofrecen alto desempeño a bajas y altas velocidades, o con cargas livianas o pesadas, sin importar las exigencias de las condiciones de operación. Estas guías deslizantes lineales motorizadas son rápidas y de alta respuesta y cuentan con un husillo de bolas y una guía LM Guide™ fabricada por THK. Al ser compacta y rígida, esta serie es efectiva para soportar grandes masas transportables. Disponibles con excitadores con entrada de pulsos o controlador integrado (red).
El controlado integrado alivia el trabajo del PLC programable porque la información necesaria para la operación del motor está integrada en el excitador. Esto simplifica la configuración del sistema para un control de varios ejes.
- Longitudes de carrera de 50 mm a 500 mm (comuníquese con su oficina de ventas local para longitudes de carrera de hasta 850 mm)
- Opciones de placa de eje X o de eje Y
- Disponibles con freno electromagnético
- Entrada de CA o CC
- Precisión de posicionamiento repetitivo = ±0.02 mm
Línea de Productos
† Para longitudes de carrera más que 500 mm comuníquese con su oficina de ventas local.
Tipo |
Tipo de Excidtador |
Alimentación |
Opciones |
Masa transportable máx.* (horizontal) (kg) |
Velocidad máx.* (mm/s) |
Carrera † (mm) |
EAS4 |
Monofásica de 100-115 VCA |
Avance de 6 mm o 12 mm Placa de eje X o de eje Y Freno electromagnético |
~15 o ~30 |
800 o 400 |
50 ~ 500 |
|
Monofásica de 200-230 VCA |
||||||
Trifásica de 200-230 VCA |
||||||
24/48 VCC |
600 o 300 |
|||||
Monofásica de 100-120 VCA |
800 o 400 |
|||||
Monofásica de 200-240 VCA |
||||||
24/48 VCC |
600 o 300 |
|||||
EAS4 |
Monofásica de 100-115 VCA |
Montaje de motor derecho o izquierdo Avance de 6 mm o 12 mm Placa de eje X o de eje Y Freno electromagnético |
~15 o ~30 | 800 o 400 |
50 ~ 500 | |
Monofásica de 200-230 VCA |
||||||
Trifásica de 200-230 VCA |
||||||
24/48 VCC |
600 o 300 |
|||||
Monofásica de 100-120 VCA |
800 o 400 |
|||||
Monofásica de 200-240 VCA |
||||||
24/48 VCC |
600 o 300 |
|||||
EAS6 |
Monofásica de 100-115 VCA |
Avance de 6 mm o 12 mm Placa de eje X o de eje Y Freno electromagnético |
~15 o ~30 |
800 o 400 |
50 ~ 500 |
|
Monofásica de 200-230 VCA |
||||||
Trifásica de 200-230 VCA |
||||||
24/48 VCC |
600 o 300 |
|||||
Monofásica de 100-120 VCA |
800 o 400 |
|||||
Monofásica de 200-240 VCA |
||||||
24/48 VCC |
600 o 300 |
|||||
EAS6 |
Monofásica de 100-115 VCA |
Montaje de motor derecho o izquierdo Avance de 6 mm o 12 mm Placa de eje X o de eje Y Freno electromagnético |
~15 o ~30 | 800 o 400 |
50 ~ 500 | |
Monofásica de 200-230 VCA |
||||||
Trifásica de 200-230 VCA |
||||||
24/48 VCC |
600 o 300 |
|||||
Monofásica de 100-120 VCA |
800 o 400 |
|||||
Monofásica de 200-240 VCA |
||||||
24/48 VCC |
600 o 300 |




Precisión de posicionamiento repetitivo = ±0.02 mm
Momento dinámico permisible =
- EAS4 - MP: 16.3 N·m, MY: 4.8 N·m, MR: 15.0 N·m
- EAS6 - MP: 31.8 N·m, MY: 10.3 N·m, MR: 40.6 N·m
Momento estático permisible =
- EAS4 - MP: 58.3 N·m, MY: 16.0 N·m, MR: 53.3 N·m
- EAS6 - MP: 86.0 N·m, MY: 34.0 N·m, MR: 110.0 N·m
*Masa transportable máx. (horizontal) = ~15 kg (avance 12 mm) o ~30 kg (avance 6 mm)
*Velocidad máx. = 800 o 600 mm/s (avance 12 mm) o 400 o 300 mm/s (avance 6 mm)
Guías deslizantes lineales
Actuador lineal compacto y potente
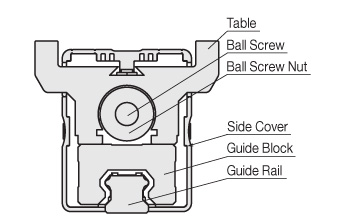
Este actuador lineal incorpora un husillo de bolass y una guía LM Guide™ fabricada por THK. Ya que la guía LM Guide de alta precisión está directamente instalada en la base del gabinete, estos actuadores son adecuados para aplicaciones que requieren paralelismo de desplazamiento. (Paralelismo de desplazamiento 0.03 mm) Al ser compacta y rígida, esta serie es efectiva para soportar grandes masas transportables.
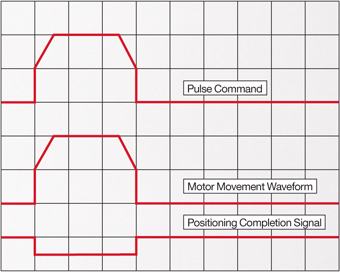
Rápido y de alta respuesta
La alta respuesta del sistema de accionamiento y motor de lazo cerrado brinda posicionamiento superior de corta distancia.
Ya que el AlphaStep serie AR opera de manera sincronizada con comandos de pulso y genera un alto par motor con un cuerpo compacto, ofrece excelente desempeño de aceleración y respuesta.
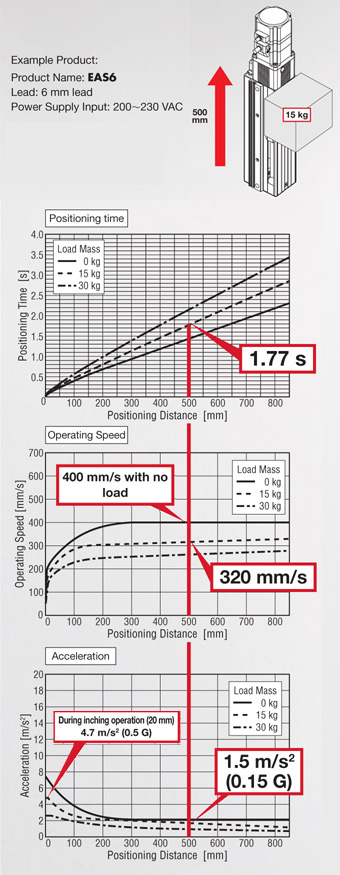
Capaz de una variedad de movimientos
Estos actuadores lineales tienen la capacidad de operar a alta o baja velocidad, o con cargas livianas o pesadas, por lo que son más fáciles de usar y ofrecen un alto desempeño sin importar las exigencias de las condiciones de operación.
Es posible operar a alta velocidad con cargas livianas o pesadas, o incluso durante operaciones de aproximación gradual.
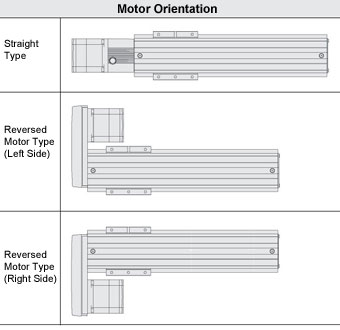
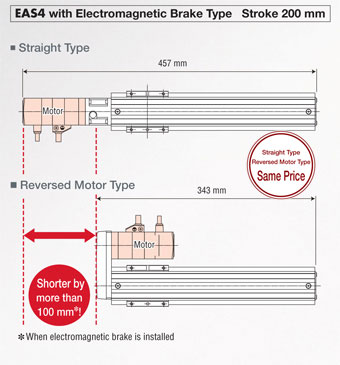
Dirección de instalación del motor
Todos los actuadores lineales se ofrecen con motor de montaje en paralelo. Esto contribuye a reducir su longitud total y a ahorrar espacio.
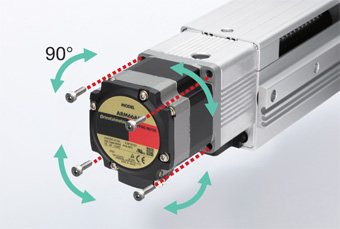
Dirección de la salida de cables
La dirección* del cable del motor puede cambiarse simplemente girando el motor. No es necesario dejar espacio detrás del motor, ya que la salida de cables está en el lateral del motor, lo que permite una conexión sencilla y ahorra espacio.
*3 direcciones para los de tipo con motor de montaje en paralelo
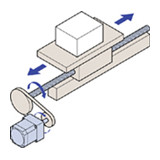
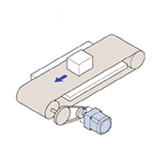
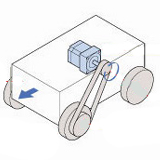
Ejemplo de aplicación
Motor de montaje en paralelo

Todos los actuadores lineales se ofrecen con motor de montaje en paralelo. Esto contribuye a reducir su longitud total y a ahorrar espacio.
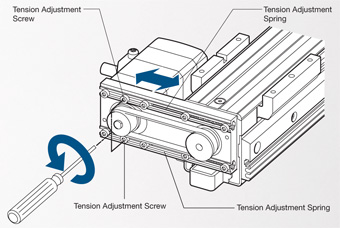
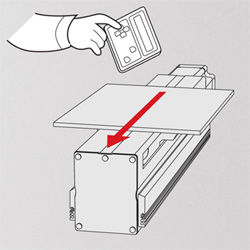
Mantenimiento simple para los de tipo con motor de montaje en paralelo
Se ha mejorado la capacidad de mantenimiento con el mecanismo de ajuste de tensión de correa único de Oriental Motor y a través de la estandarización de las piezas de mantenimiento sobre la base de la serie AR.
Gracias al mecanismo de ajuste de tensión de correa único de Oriental Motor, el reemplazo de correas es sencillo.
Si se afloja el tornillo, la tensión de la correa se ajusta a un valor apropiado mediante la fuerza del resorte.
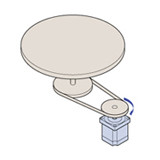
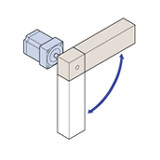
Placa de eje X o de eje Y

Elija una placa de eje X o de eje Y para cumplir con las necesidades de su aplicación.

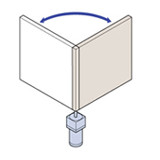
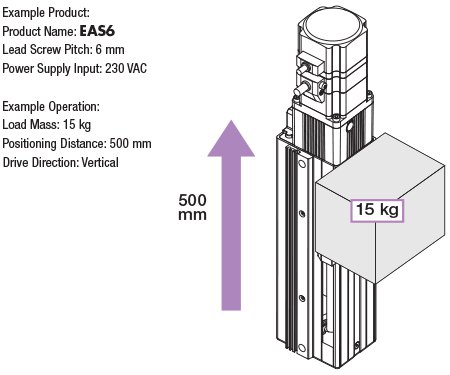
Freno electromagnético
La operación vertical es posible con un freno electromagnético. La posición de la carga puede mantenerse cuando la alimentación se apaga. Ya que la pieza de trabajo no caerá si se produce una falla en la alimentación o una desconexión, puede usar equipos en los que la pieza se mueve verticalmente de manera segura.
Controlador integrado (red)
![]()
Se alivia el trabajo del PCL programable porque la información necesaria para la operación de las guías deslizantes y los cilindros lineales motorizados está integrada en el excitador. Esto simplifica la configuración del sistema para un control de varios ejes. Puede configurarse mediante software de configuración de datos, un módulo de control (se vende por separado) o comunicación RS-485.
Con un convertidor de red (se vende por separado), se puede establecer una comunicación con redes CC-Link, MECHATROLINK o EtherCAT. Los datos operativos, la configuración de parámetros o los comandos operativos pueden ingresarse a través de los distintos tipos de comunicación.
- Se facilita el trabajo del controlador maestro programable y se reducen los costos cuando se utilizan varios ejes.
- Unifica los esclavos para compatibilidad con distintas redes.
- También admite la función de envío grupal entre esclavos.
- Compatibilidad con CC-Link: Máx. 12 ejes.
- Compatibilidad con MECHATROLINK y EtherCAT: Máx.16 ejes.
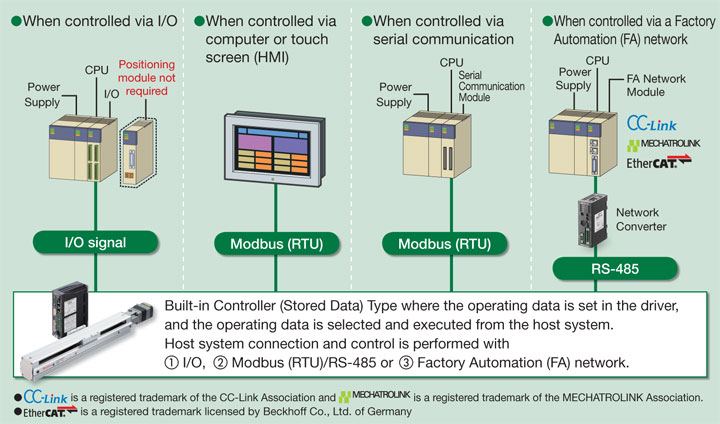
Tipo de operación
Con paquetes de controlador integrado, la velocidad de operación y la cantidad de desplazamiento de las guías deslizantes y los cilindros lineales motorizados se configuran con datos operativos y las operaciones se realizan basadas en los datos operativos seleccionados.
Producto |
Contenido |
||
Común |
Método de control |
Control de E/S |
|
Comunicación RS-485 |
Conexión de convertidor de red |
||
Conexión de protocolo Modbus (RTU) |
|||
Entrada de comando de posición |
Se configura con el número de dato operativo Rango de comandos por punto: -8388608~8388607 [pasos] (unidad de configuración: 1 [paso]) |
||
Entrada de comando de velocidad |
Se configura con el número de dato operativo Rango de comandos: 0 ~ 1000000 [Hz] (unidad de configuración: 1 [Hz]) |
||
Entrada de comando de aceleración/desaceleración |
Se configura con parámetros o el número de dato operativo. Puede seleccionarse el índice de aceleración/desaceleración [ms/kHz] o el tiempo de aceleración/desaceleración [s]. Rango de comando: 0.001 ~ 1000.000 [ms/kHz] (unidad de configuración: 0.01 [ms/kHz]) 0.001 ~ 1000.000 [s] (unidad de configuración: 0.001 [s]) |
||
Control de aceleración/desaceleración |
Filtro de velocidad, filtro de media móvil |
||
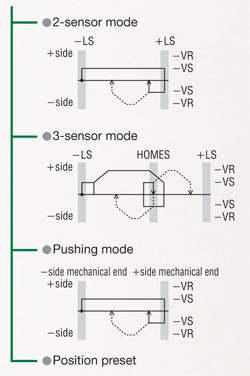
Operación de regreso al inicio |
Método de regreso al inicio |
Modo de 2 sensores |
Esta es la operación de regreso al inicio usando sensores de límite (+LS, -LS). |
Modo de 3 sensores |
Esta es la operación de regreso al inicio usando sensores de límite y sensor de INICIO. |
||
Modo de empuje*1 |
Esta es la operación de regreso al inicio para empujar hacia el extremo mecánico de una guía deslizante lineal, etc. |
||
Preestablecimiento de posición |
Esta función permite confirmar una posición de inicio al ingresar P-PRESET usando una posición arbitraria. |
||
Puede configurarse un valor arbitrario para la posición de inicio. |
|||
Operación de Posicionamiento |
Cantidad de puntos de posicionamiento |
64 points (No. 0 ~ 63) |
|
Modo de operación |
Modo incremental (posicionamiento relativo) |
||
Modo absoluto (posicionamiento absoluto) |
|||
Funciones de operación |
Operación de acción única |
Esta es una operación de posicionamiento punto a punto (PTP). |
|
Operación vinculada |
Esta es una operación de posicionamiento de cambio de velocidad multipaso vinculada con datos operativos. |
||
Operación vinculada 2 |
Esta es una operación de posicionamiento con un temporizador vinculada con datos operativos. El temporizador (tiempo de permanencia) puede configurarse en el rango de 0 ~ 50.000 [s]. (Unidad de configuración: 0.001 [s]) |
||
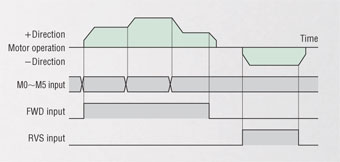
Métodos de arranque |
Modo de selección de los datos operativos |
La operación de posicionamiento comienza cuando se ingresa START después de haber seleccionado M0~ M5. |
|
Modo directo (posicionamiento directo) |
La operación de posicionamiento comienza con el número del dato operativo que se configuró con los parámetros una vez que se ingresó MS0 ~ MS5. |
||
Modo secuencial (posicionamiento secuencial) |
La operación de posicionamiento comienza en orden a partir del dato operativo No. 0 cada vez que se ingresa SSTART. |
||
Operación continua |
Cantidad de puntos de velocidad |
64 puntos (No. 0 ~ 63) |
|
Método de cambio de velocidad |
Esto cambia el número de dato operativo. |
||
Otras operaciones |
Operación JOG |
Al ingresar +JOG o -JOG se realiza una operación de avance común. |
|
Operación de regreso automático |
Automáticamente regresa a la posición de detención original cuando el motor se desajusta debido a una fuerza externa durante el modo sin excitación. |
||
Modo de control |
Puede seleccionarse el modo normal o el modo de control de corriente. |
||
Respaldo absoluto |
Mediante el uso de una batería (se vende como accesorio) el sistema se hace absoluto. |
||
Operación de Posicionamiento

Operación de regreso al inicio
Equipado con una secuencia para la operación de regreso al inicio que reduce la carga en el anfitrión (controlador maestro) y los problemas de combinar programas o secuencias.
Operación continua
Otras operaciones
Operación JOG (operación de prueba)
Operación de regreso automático
Función principal
Función |
Contenido |
Función de configuración de resolución del motor*1 |
La resolución del motor puede cambiarse con el excitador sin el mecanismo de reducción de velocidad operado mecánicamente. Puede realizarse la configuración deseada de 100~10000 [P/R]. Cómo obtener la resolución en el actuador |
Función de envío grupal (comunicación RS-485 o mediante convertidor de red) |
Configure un grupo de varios ejes conectados usando comunicación RS-485 y envíe comandos por grupo. Realice operaciones simultáneas y arranques simultáneos para múltiples ejes. |
Sobrecarrera de hardware |
Esta función detiene el actuador cuando se excede el límite mecánico. |
Sobrecarrera de software |
Esta función detiene el actuador cuando se excede el límite establecido por el software. Según la configuración, también puede emitirse una alarma sin detención. |
Entrada STOP (detención externa) |
Esta función detiene la operación de manera forzosa cuando se produce una anomalía u otro problema. Seleccione la detención instantánea, la detención por desaceleración, o la desconexión de todos los devanados (la fuerza de mantenimiento del actuador se apaga) como mecanismo de detención. |
Emisión de códigos de alarma |
Se emiten los códigos de las alarmas que se están produciendo. |
Historial de alarmas |
Aunque la alimentación se apague, pueden almacenarse hasta 10 alarmas emitidas. Esto puede usarse para la resolución de problemas. |
Filtro de velocidad |
Se usa para hacer ajustes cuando se requiere un arranque/detención uniforme o un movimiento uniforme durante la operación a baja velocidad. Incluso para los cambios repentinos en el comando de operación, esta función controla los cambios en la velocidad del actuador para evitar que se vuelvan demasiado grandes. |
Función de programación*1 |
Mueva la carga a la posición objetivo y almacene los datos de la posición en ese momento como datos de posicionamiento. |
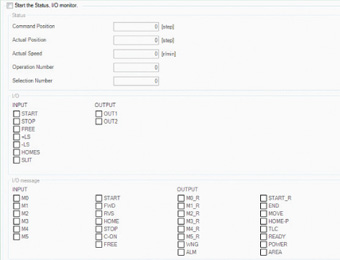
Monitoreo de E/S*1 |
Controle el estado de encendido/apagado de las señales de E/S. |
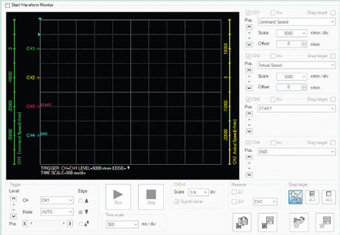
Monitoreo mediante forma de onda*2 |
Verifique la velocidad de operación y las señales de E/S como forma de onda. |
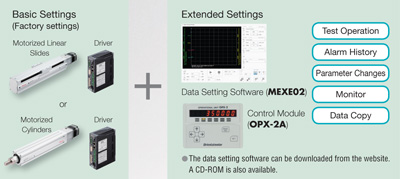
Funciones extendidas
El software de configuración de datos* y el módulo de control opcional habilitan la respuesta ante cambios en parámetros, la visualización del historial de alarmas y una variedad de tipos de monitoreo que pueden personalizarse según las necesidades del cliente. Todas las funciones que figuran más abajo son para el modelo con entrada de pulsos o controlador integrado (red) a menos que se indique lo contrario.
*Se requiere un cable para conexión a la PC para el software de configuración de datos (se vende por separado** - Ver Accesorios).
**Hay disponible un cable de comunicación CC05IF-USB GRATUITO por cliente. Comuníquese con el soporte técnico para obtener más información.
Software de configuración de datos
MEXE02 Software de configuración de datos
El software de configuración de datos fácil de usar permite configurar y verificar datos en el accionamiento propiamente dicho usando una computadora.

Monitoreo de E/S
El estado del cableado de E/S hacia el excitador puede verificarse con una computadora. Esto puede usarse para verificaciones de E/S posteriores a la instalación del cableado o para verificaciones de E/S durante la operación.
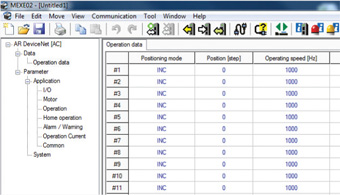
Configuración de parámetros y de datos operativos
Los parámetros y los datos operativos pueden configurarse fácilmente en la computadora. Ya que la configuración de los datos puede guardarse, al intercambiar el excitador simplemente transfiera los datos almacenados para crear la misma configuración.
*Tipo con controlador integrado (red) únicamente
Monitoreo mediante forma de onda
El estado operativo del motor (como la velocidad de comando y el factor de carga del motor) puede verificarse con una imagen similar a la de un osciloscopio. Esto puede utilizarse para encender y ajustar el equipo.
Programación y operación remota
El software de configuración de datos puede usarse para accionar el motor. Puede usarse para llevar a cabo tareas de programación o para realizar pruebas.
*Tipo con controlador integrado (red) únicamente
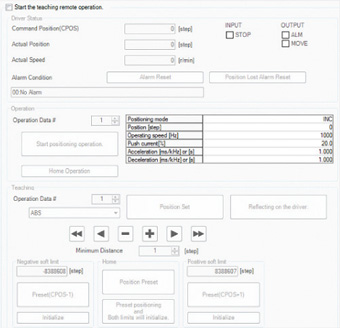
*Captura de pantalla del modelo con controlador integrado (red)
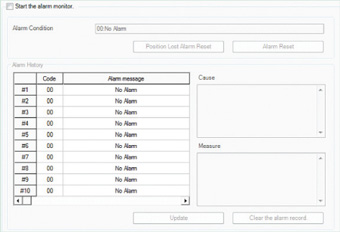
Monitoreo de alarmas
Cuando se produce una anomalía, el contenido de esta y la contramedida pueden verificarse.
Módulo de control (se vende por separado)

Módulo de control OPX-2A
El software de configuración de datos y el módulo de control pueden usarse juntos con la serie EAS.
Función de programación
Pueden llevarse a cabo tareas de programación usando el software de configuración de datos MEXE02 o el módulo de control OPX-2A (se vende por separado). La placa y las varillas se mueven a la posición deseada y los datos de la posición en ese momento se almacenan como datos de posicionamiento.
*Tipo con controlador integrado (red) únicamente
Función principal
| Producto | Descripción general | Configuración básica | Configuraciones extendidas |
Selección del modo de entrada de pulsos |
Seleccione el modo de entrada de 1 pulso o entrada de 2 pulsos (lógica negativa). |
||
Además de las configuraciones normales, puede configurarse la entrada de diferencia de fase. |
- | ||
Ajuste de resolución |
Seleccione la resolución con los interruptores de función (D0, D1, CS0, CS1). |
||
Cambia el valor de los equipos electrónicos correspondientes a cada interruptor de función (D0, D1, CS0,CS1). |
- | ||
Configuración de la corriente de funcionamiento |
Cambia la configuración de la corriente de funcionamiento con el interruptor de configuración de corriente (CURRENT). |
||
Cambia el valor que corresponde a cada uno de 0~F (16 niveles) para el interruptor de configuración de corriente (CURRENT). |
- | ||
Configuración de la corriente en espera |
Configura la relación de la corriente en espera relativa a la corriente de funcionamiento. |
- | |
Configuración de las coordenadas de rotación del motor |
Configura las coordenadas de rotación del motor. |
- | |
Señal de todos los devanados encendidos (entrada C-ON) |
La señal de entrada para la excitación del motor. |
||
Configura la lógica de entrada C-ON para cuando se ingresa la fuente de alimentación. |
- | ||
Activación/desactivación de la operación de regreso a la posición de excitación mientras todos los devanados están encendidos |
Configura si se produce el regreso a la posición de excitación o no (posición de desviación 0) mientras todos los devanados están encendidos. |
- | |
Activación/desactivación de la señal de código de alarma |
Se configura la emisión de un código cuando se produce una alarma. |
- | |
Configuración de rango de la señal de salida END |
Cambia el rango de la señal de salida END. |
- | |
Desplazamiento de la señal de salida END |
Desplaza el valor de la señal de salida END. |
- | |
Salida de fase A/B |
Se utiliza para verificar la posición del motor. |
||
Señal de salida de sincronización |
Se emite cada vez que el motor rota 7.2° (0.4° para placas de salida) |
||
Configuración del filtro de velocidad |
Aplica un filtro al comando de operación para controlar la acción del motor. |
||
Cambia el valor que corresponde a cada uno de 0~F (16 niveles) para el interruptor de configuración. |
- | ||
Función de supresión de la vibración para el modo normal |
Se configura para suprimir la vibración resonante durante la rotación. |
- | |
Se configura para suprimir la vibración durante la aceleración, desaceleración y detención. |
- | ||
Ajuste de gain tuning para el modo de control de corriente* |
Ajusta la gain tuning del ciclo de velocidad y la posición. |
- | |
Ajusta la constante del tiempo de integración de la velocidad. |
- | ||
Configura la frecuencia de vibración del control de amortiguación. |
- | ||
Configura la activación o desactivación del control de amortiguación. |
- | ||
Selección de la posición de excitación del motor con la alimentación encendida |
Selecciona la posición de excitación del motor para cuando se enciende la alimentación. |
- | |
Configuración del módulo de control |
Selecciona el uso de símbolos o valores absolutos para visualizar la velocidad del módulo de control. |
- | |
Configura la relación de engranajes del motor con reductor de engranajes para el monitor de velocidad (la relación de engranajes para la serie DGII es de 1:18). |
- |
Puertas de enlace de red

El protocolo de comunicación del controlador maestro, la red de Automatización Industrial (FA, Factory Automation), es convertida al protocolo de comunicación RS-485 de Oriental Motor. La conexión de los productos de Oriental Motor compatibles con la red se efectúa mediante un cable de comunicación RS-485.
- Redes compatibles:
CC-Link, MECHATROLINK-II, MECHATROLINK-III, EtherCat
*Para uso con excitadores con almacenamiento de datos (red).
![]()
![]()
![]()
Controlador universal SCX11

El SCX11 es un controlador altamente funcional y sofisticado equipado con funciones de ejecución y edición de programas. Utilice el SCX11 como un controlador de almacenamiento de programa para establecer una conexión con cualquiera de los excitadores de entrada de pulsos estándar de Oriental Motor. El SCX11 también puede controlar el motor a través de comunicaciones seriales como USB, RS-232C y CANopen. Acepta entradas de codificador.
* Para uso con excitadores de tipo de entrada de pulsos.
Cable de comunicación RS-485

Estos cables se utilizan para conectar controladores cuando se está utilizando un tipo de controlador integrado de una manera multi-caída.
*Para uso con excitadores con almacenamiento de datos (red).
Producto |
Longitud |
Producto (s) Aplicable (s) |
0.33 ft. (100 mm) |
Entrada de CC |
|
0.82 ft. (250 mm) |
Entrada de CC |
Kit de batería

Puede construir un sistema absoluto que detecte posiciones absolutas conectando la batería de accesorios (se vende por separado).
*Para uso con excitadores con almacenamiento de datos (red).
Opciones de control - Módulo de control
Es posible establecer y cambiar la configuración de los parámetros del excitador interno y la configuración de datos. También pueden usarse para monitoreo de velocidad y de E/S, programación, etc.
*Para uso con excitadores con almacenamiento de datos (red).
Opciones de control - Software de configuración de datos

Este cable de comunicación es necesario para conectarse al computador en el que está instalado el software de configuración de datos.
Cables

Estos cables se utilizan para conectar o ampliar la distancia entre el motor y el conductor.
Requerido (se vende por separado)
Utilice un cable de motor flexible si el motor está instalado en una pieza móvil o su cable se flexionará.
Kit de sensores

El conjunto de sensores consta de tres juegos de un sensor, un soporte de instalación del sensor y un cable de sensor flexible con un conector de 6,6 pies (2 m) y una placa de blindaje. Los tornillos necesarios para la instalación también están incluidos.
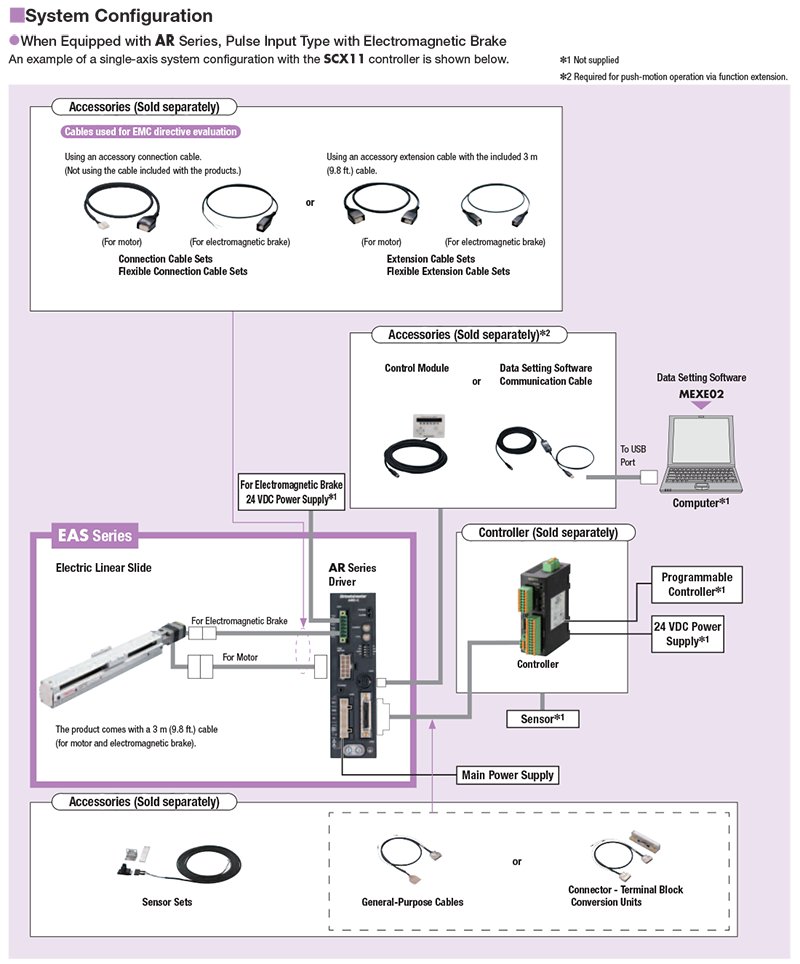
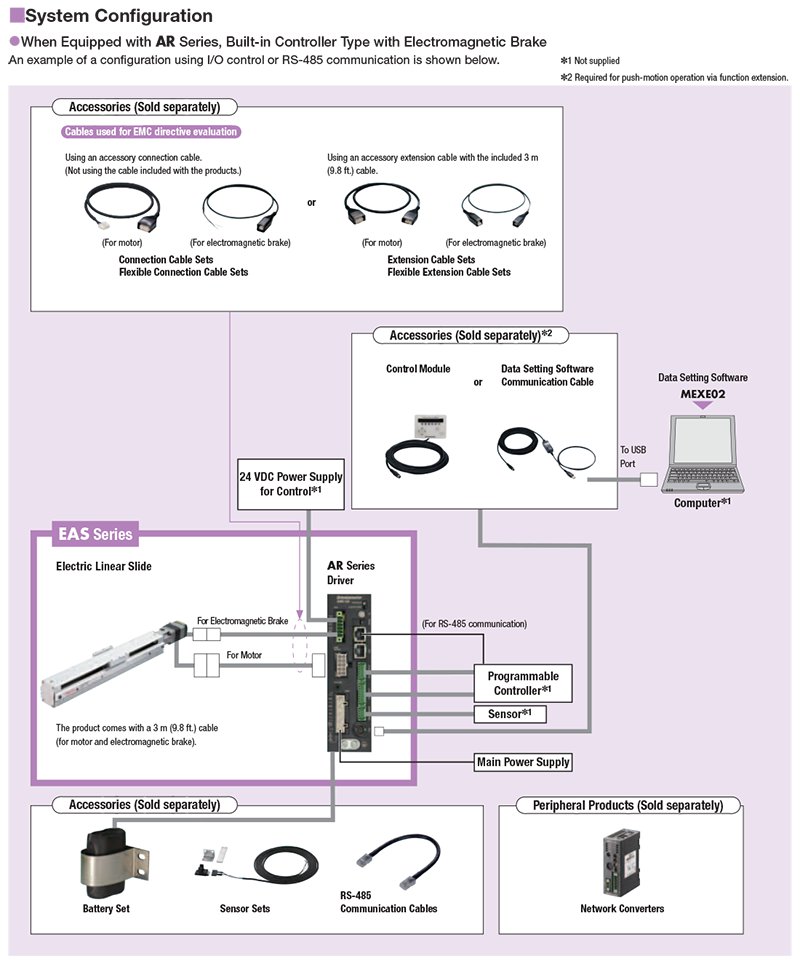
Configuración del sistema
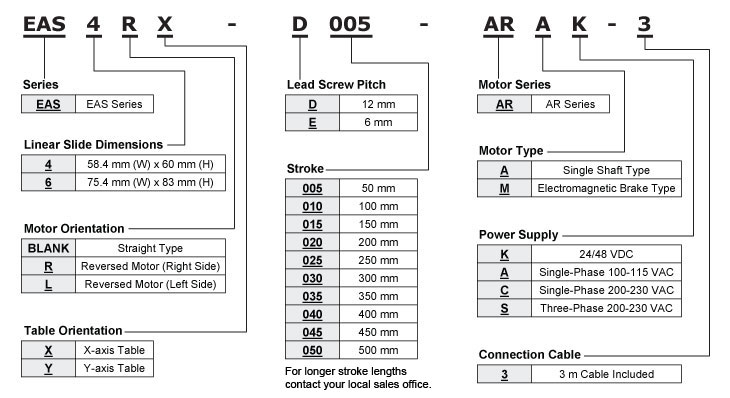
Código del número de pieza
Entrada de pulso Type
Controlador integrado (red) Type